Requirements for autonomous and connected vehicles of the future
24 . FEB 2022
A number of trends and market forces are poised to produce explosive growth in demand for automotive communication in the near future. Automated driving, for example, requires enormous quantities of high-resolution sensor data (lidar, camera, radar, ultrasound) to create an accurate model of the vehicle’s surroundings. Information volumes are also increasing not only for intravehicular communication, but also for communication between the vehicle and the external environment, e.g. an automotive manufacturer’s cloud.
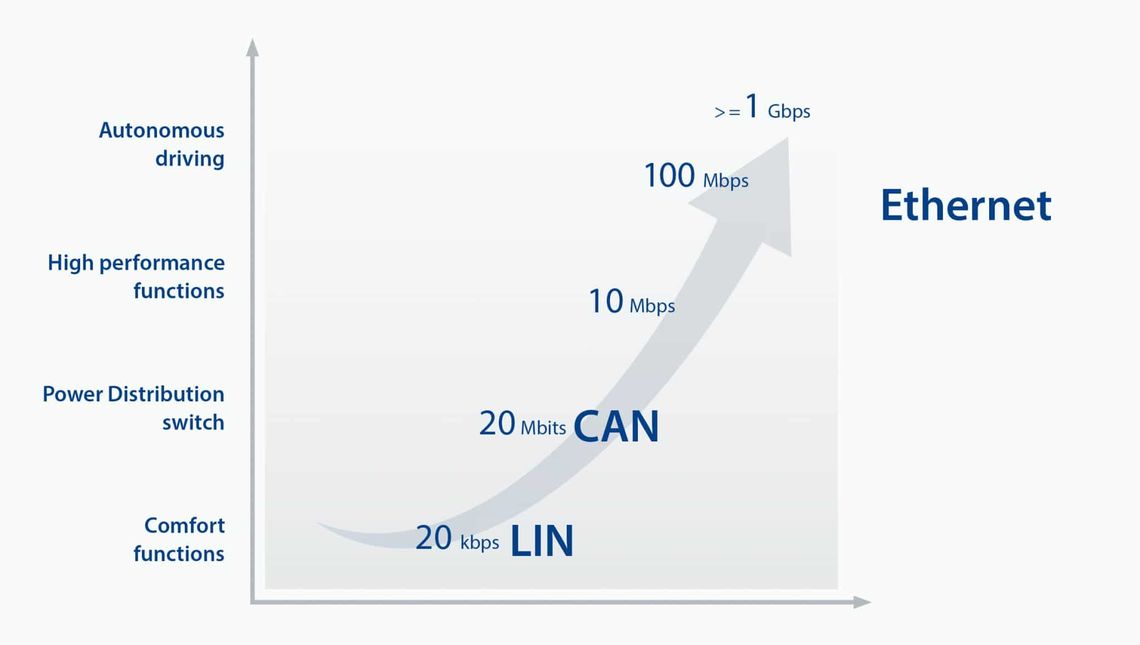
The more demands are placed on vehicle functions, the more data is required.
Ethernet technology has become indispensable in new EE architectures for the handling and real-time transmission of these ever-increasing data volumes within vehicles. The joint development of zonal controllers by Valeo and Leoni also relies upon this technology.
Automotive Ethernet
The main difference between conventional Ethernet as known in the IT sector and automotive Ethernet 100Base-T1 is that the latter is generally suitable for communication via unshielded and unsheathed twisted pair cables, similar to those already in use for the CAN bus.
Physically, automotive Ethernet (>=100Mbit/s) is always a point-to-point connection. This means that a network with more than two users requires a “switch” (image 2). The switch forwards the data to the connected control units as required.
Since switches represent data crosspoints, they can cause bottlenecks and thus delays. Appropriate measures must be taken to establish and guarantee deterministic, real-time data exchange for safety-relevant driving functions.
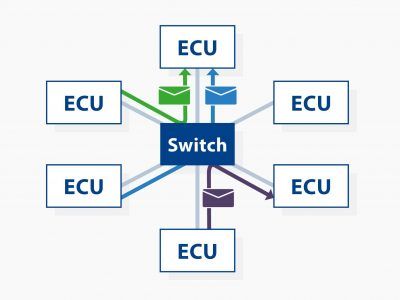
An Ethernet switch forwards messages to the correct recipient(s).
Time Sensitive Networking – “TSN“
This is solved by various technologies defined in the “Time Sensitive Networking” set of standards. These technologies include network time (gPTP), messaging management (traffic shaper), and redundancy mechanisms.
When streaming a video, for example, data must be buffered to ensure a continuous movie. Only limited data buffering is possible for real-time control algorithms, however, since devices such as radar sensors need to pass on their data without delay in order to ensure environment recognition. A shared understanding of time (network time) for all functions is a fundamental requirement for such real-time control algorithms.
Generalized Precision Time Protocol – gPTP
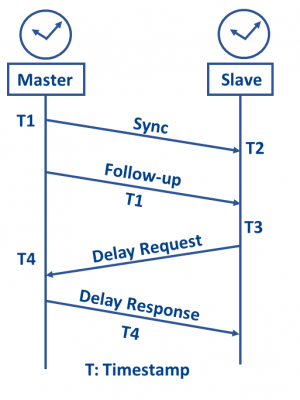
The Generalized Precision Time Protocol (gPTP) is used to ensure precise and synchronized time within the network.
This protocol involves the exchange of specific messages between network users and measurement of the processing time for these messages. A central time master is also defined, which provides the time to which other network components are synchronized.
A constant time master and its replacement can be immediately set to reduce initialization time or downtime.
The generalized PTP protocol provides fixed mechanisms to determine time shifts and therefore to meet the exact time requirements within automotive solutions.
Traffic Shaping
The core functionality of a TSN network is to prioritize network traffic and thereby guarantee deterministic behavior. In other words, the point is not to ensure that most messages arrive as quickly as possible, but rather that important messages must arrive no later than after a certain time. Once the network is properly planned, a user can rely on all information being available in the required place and at the correct time. It is possible, for example, to guarantee processing of temporally synchronous data from different sensors at a central location with the exact time stamp of the network time.
This behavior is accomplished by synchronous or asynchronous “traffic shapers.” The synchronous Qbv Traffic Shaper works like a train schedule. Just as railroad companies plan the exact time when trains leave or arrive at a station, here there is a plan for when a particular message is sent and forwarded until it arrives at its destination, avoiding conflicts between different messages. gPTP acts like a railway station clock in serving as the central time basis.
Asynchronous traffic shapers work according to other principles, using different queues and sending rules. In these network components, it is mathematically possible to calculate whether the required maximum “delay” (latency) between sender and receiver can be maintained. If the required durations cannot be met, then either the message catalog (data quantity/transmission times) or the network (more/faster connections) needs to be adjusted.
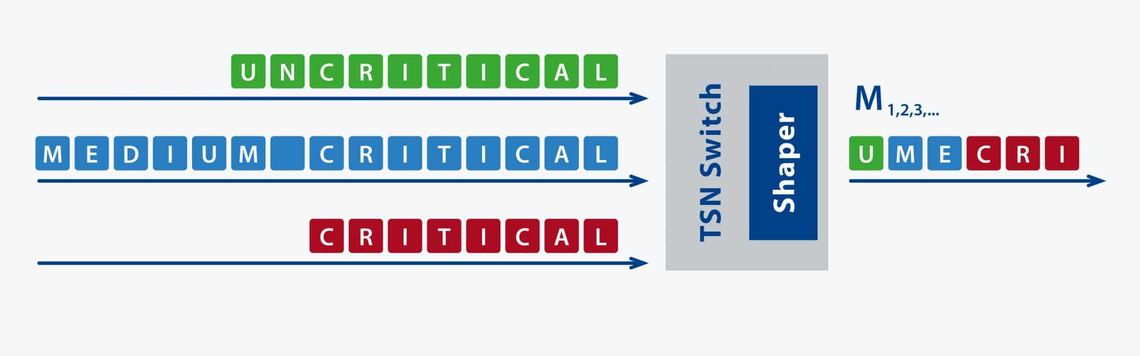
The TSN Shaper ensures that critical messages (e.g. important sensor data) are always forwarded first and places messages with lower priority (e.g. multimedia) at the end.
Network redundancy
Redundancy mechanisms are essential for ensuring the necessary vehicle safety and preventing errors. For example, they ensure that data transmission is not only timely but also fail-safe. This is achieved not only through physical duplication of sensors, intelligence, and actuators, but also by multiplying network connections and data streams. TSN has created mechanisms that enable messages in double-connected networks to reach their target via defined routes, rather than “running in circles.” Data streams can be duplicated at any point and then merged again, allowing the redundant connection to be implemented at the data level as well. This means that two identical data streams can run over two parallel physical links and be processed further at the final destination, avoiding any problems caused by subsequently arriving duplicate messages.
Network architecture
These mechanisms allow new network architectures within the vehicle, which can be used to implement automated driving. Ethernet provides a safe and fast way to connect vehicle sensors and actuators to multiple central control units, which monitor one another and decide how to steer, accelerate, and brake based upon the collected data.
Conclusion
With TSN, Ethernet will be used in future industry and aviation applications not only to handle large data volumes for purposes such as entertainment, but also to safely manage large quantities of time-critical data. This is an essential prerequisite for automated driving.


Do you have a question?
We’ll be glad to help. We look forward to hearing from you.
Phone +49 9321 304-0
E-mail blog@leoni.com




